
highlights
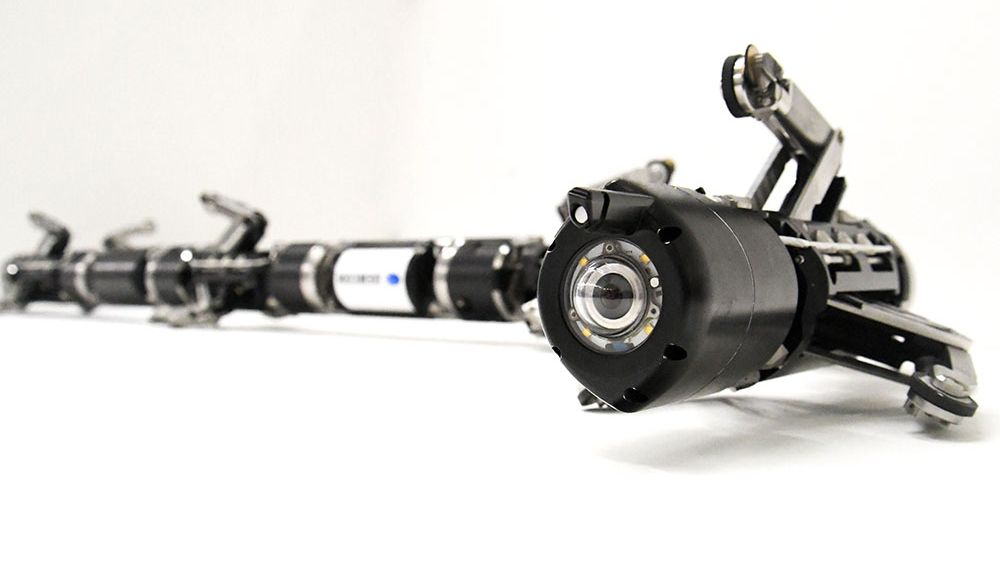
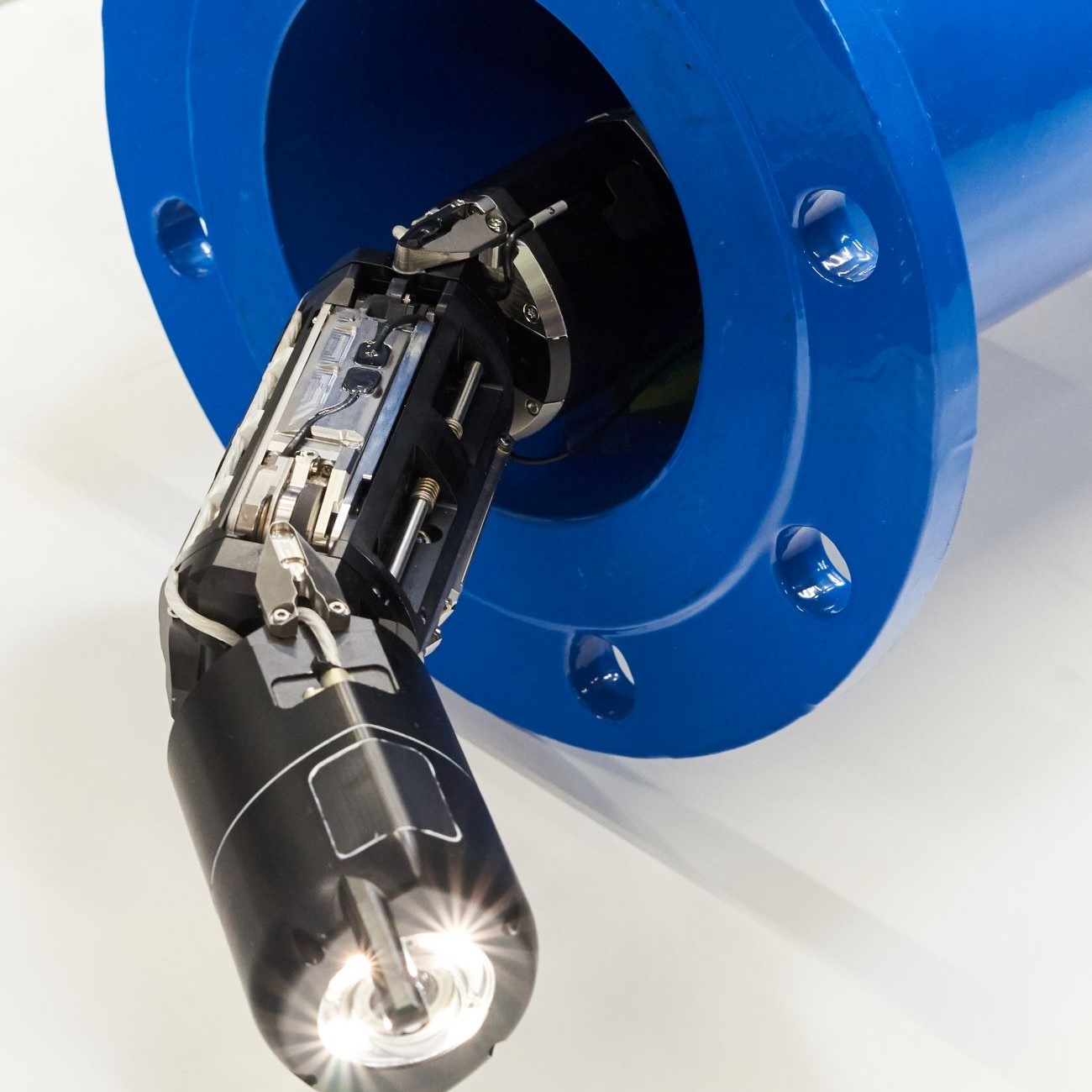
- length 2 meters, diameter 9-30 centimeters
- 15 individually driven wheels
- 19 hinge-connected modules
- cameras, computing power, drives, batteries, charging coils and sensors
construction-technical and mechatronic tour de force.
The autonomous inspection robot AIR can help to detect leaks and corrosion in water pipes and map complete networks. Our design of the articulated robot was a construction-technical and mechatronic tour de force. AIR is a kind of snake with an extensive payload that must be able to maneuver in occasionally very narrow pipes, for example through right-angled bends, while dealing with biofouling and other ‘obstacles’. We provided the robot with the required mechanical dexterity, ensuring that the communication and electrical connections are very flexible and watertight at the same time.
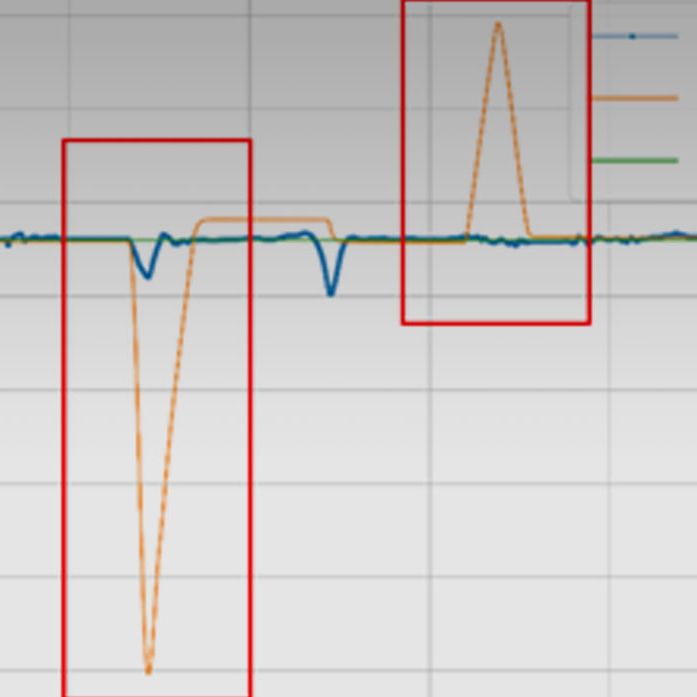
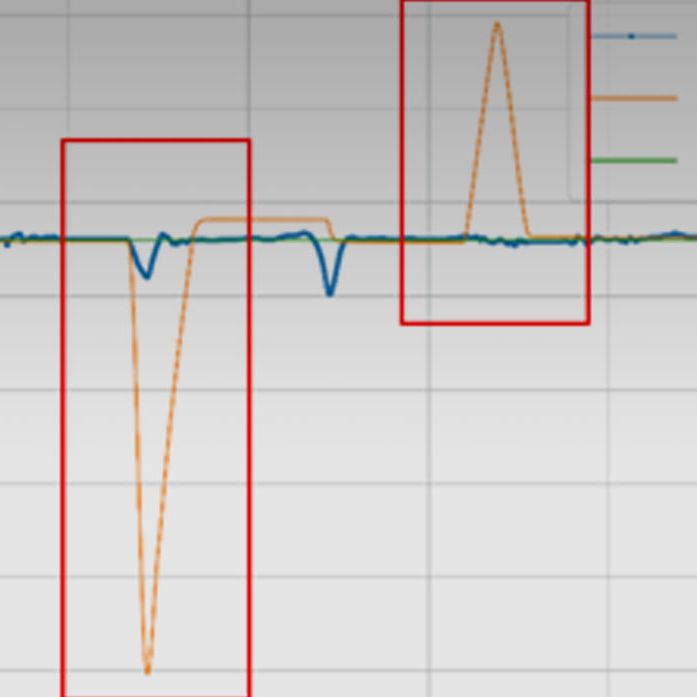
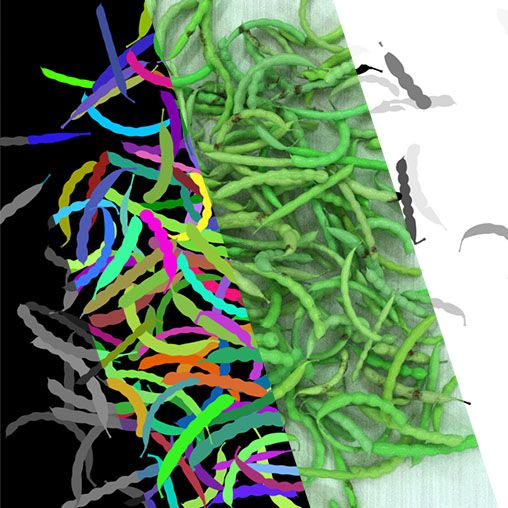
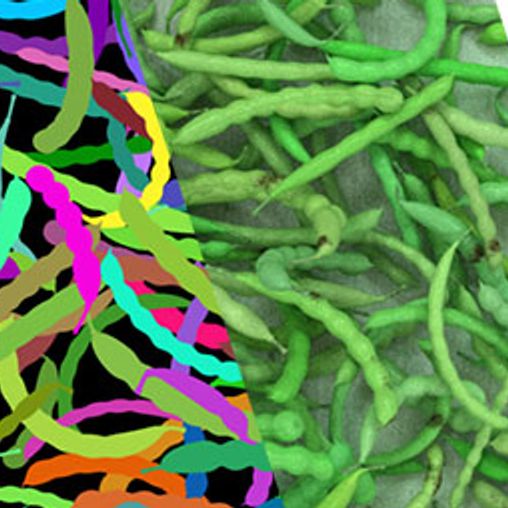
seeing, hearing, training.
Our biggest challenge was that the robot must be able to operate completely autonomously in the pipeline, because there is no (wireless) connection to a central computer. So, we provided AIR with artificial intelligence; a neural network for interpreting camera images: is it seeing a bend, a narrowing, an air bubble or an obstacle? In addition, a hydrophone on board enables hearing leakages. We then started training AIR’s control system ‘on dry land’ using synthetic data.
“we have the expertise and capacity for industrialization and production.”
The next step is now to experiment with AIR in a large test network. Based on the results, the Aquatech Innovation Award-winning robot can then be developed into an industrial product. We have the expertise and capacity for the industrialization and production phases. Moreover, we see opportunities for developing similar inspection solutions for gas cooling-water and process-water inspection.